文章目录
基于GPS信息的箭头导航插件 – 该插件基于全景图的GPS坐标信息自动为漫游生成导航箭头。
插件正常工作的条件
1. 全景图需要有GPS坐标信息。Panoramas with GPS coordinates
2. 全景图需要正确地对齐虚拟正北方位或者包含正确的EXIF的GPSImgDirection标签。
当全景图没有GPS坐标
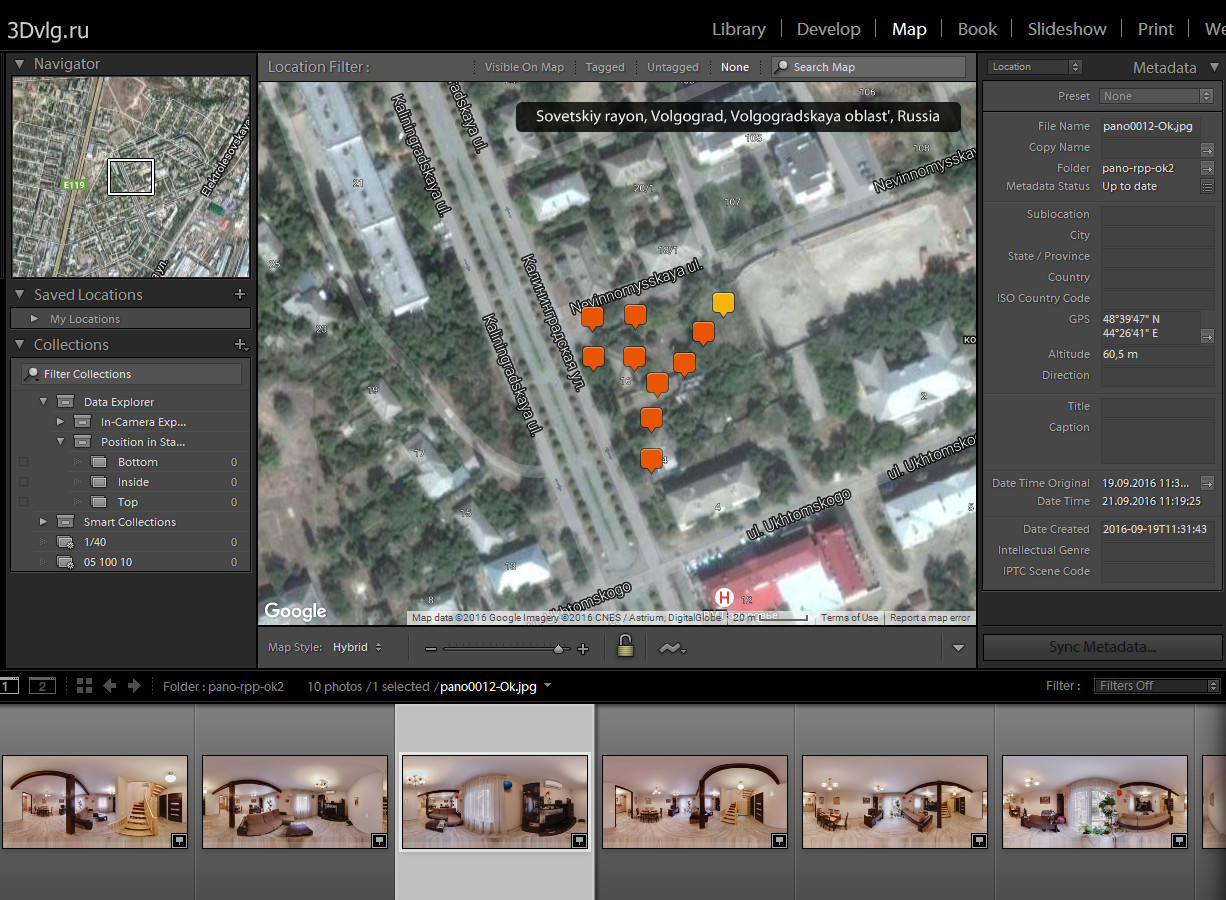
必须为每张全景图指定GPS坐标。可使用lightrrom,在地图分栏下在地图上放置每张全景图。全景图的地理坐标与实际拍摄地点无关,地图上的全景图的正确相对位置才是重要的。
你也可以使用如GeoSeTeter记录GPS轨迹并同步到全景图中。
虚拟正北方位
我们必须保证每一张全景图都是对准相同的方位,也就是每张全景图都是要正对虚拟正北方位。这样才能使用keepview模式。具体可查看PTgui拼接详解(2)- 校正水平与调整方位

如全景图的虚拟正北方位不相同,你需要在PTGui调整或在Photoshop使用偏移滤镜。
对于一些全景相机拍摄的球面全景图则不需要对齐全景图,具体可查看下面使用 ‘use_scenes_heading’ 数值的说明。
使用krpano生成漫游
使用 “MAKE VTOUR (MULTIRES) droplet.bat”生成漫游,复制 autogarrows 文件夹到 plugins 文件夹下。
在tour.xml的最后</krpano> 标签之前,插入下面代码
|
1 2 |
<include url="plugins/autogarrows/autogarrows_settings.xml" /> <include url="plugins/autogarrows/autogarrows.xml" /> |
在使用插件之前,你需要修改 autogarrows_settings.xml 文件。
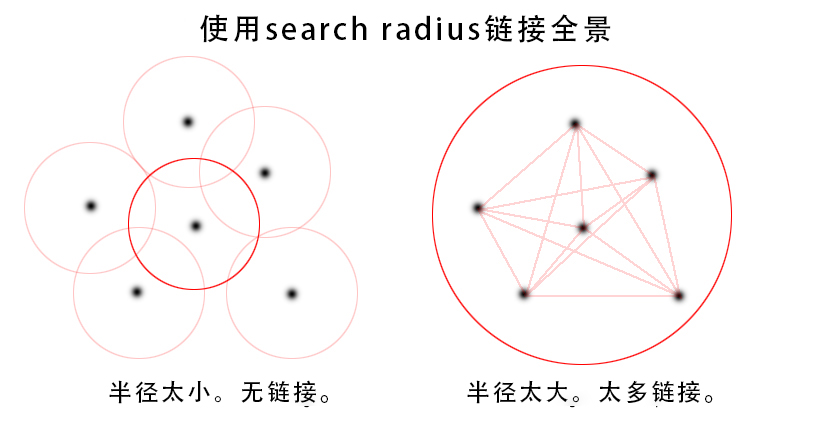
- search_radius 设置搜索半径(单位为米),确定某个全景图附近的哪些全景被链接到。
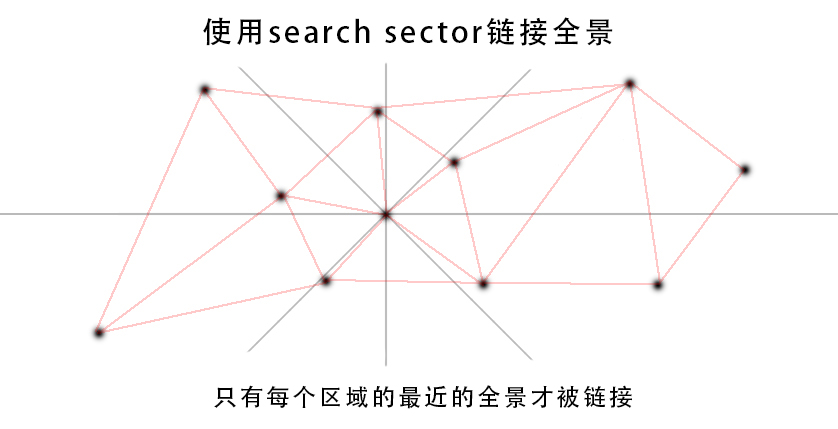
- search_sector 设置搜索扇形区域(单位为弧度),确定某个全景图附近的哪些全景被链接到。(search_radius 设置会被忽略)
- ath_shift 方位角修正 – 角度数值将让全景图的虚拟正北方位和真正地图的北方位进行对齐。
- create_backups 如果设置为true,则AutoGArrows GPS analyser每次运行后会生成一个autogarrows.xml的备份文件。
- create_tour_xml 如果设置为true,则AutoGArrows GPS analyser在 tour.xml 文件插入热点。
- create_tooltips 如果设置为true,则AutoGArrows GPS analyser为每个创建的热点添加文字提示。
- use_scenes_heading 可设置disabled (默认), prealign, athshift (详细说明看下文)
- tooltips_template 文字提示的模版,使用实际数值替代样板
- hotspots_atv, hotspots_style 新创建热点的atv和style数值。
这时候在浏览器打开漫游,是没有导航箭头的!你必须使用AutoGArrows GPS analyser 。你需要将tour.xml文件作为参数运行AutoGArrows GPS analyser。将 tour.xml 文件拖拽到eautogarrows.exe 。
如果运行AutoGArrows GPS analyser后,没有箭头,则需要增加 search radius,如果太多箭头,则需要减少。每次运行后进行统计会是对更精细的微调的一个好的做法。
为了调整搜索半径以及对方位角进行校正,你需要多次运行AutoGArrows GPS analyser。当第一次运行后,AutoGArrows GPS analyser会创建批处理文件 (plugins/autogarrows/autogarrows.xml.bat for Windows 以及 plugins/autogarrows/autogarrows.xml.sh for MAC OS),这样就不用每次都拖拽xml文件。只需要修改autogarrows_settings.xml 文件后运行该批处理文件。
使用 ‘use_scenes_heading‘ 数值
当krpano构建漫游时,它会读取EXIF的 GPSImgDirection 标签,并将数值存储到每个场景中。通常全景相机都包含了该信息。默认下 use_scenes_heading 是 disabled ,这样每个全景的方位校正信息会被忽略。如果 use_scenes_heading 是 prealign(如果 keepview模式漫游,则优先使用该数值) 则AutoGArrows会预先对齐全景。如果 use_scenes_heading 是 athshift 则AutoGArrows会在热点的ath数值中使用全景图方位校正而全景图本身仍然是没有对齐的。
有些全景相机的全景图没有包含 GPSImgDirection 标签,但包含 PoseHeadingDegrees 信息,这两个是一样的,但会被krpano忽略。在这种情况下,你需要使用来自 panoexif 的小脚本将PoseHeadingDegrees 数值复制到 GPSImgDirection 标签之后才将全景图拖到krpano批处理中。
关于 ‘search_radius‘ 和 ‘search_sector‘
如果设置了 search_sector ,则会将每个场景的全景空间氛围若干扇区,只有该扇区最近的全景才会被包含。在这种情况下,search_radius 会被忽略。
保存tour.xml文件
当分析器带来满意的结果后,你可以使用它来创建tour.xml。
如果 create_tour_xml 设置为 true ,则AutoGArrows GPS analyser 会创建tour-autogarrows.xml。你可以使用最新创建的 tour-autogarrows.xml 文件来替换 tour.xml file 然后从漫游中完全移除AutoGArrows插件。
BUG提示
- 发现无法生成tour-autogarrows.xml,请删除exe文件,保留autogarrows_settings.xml和autogarrows.xml文件。
- autogarrows.xml文件有语法错误,请生成后打开,在xml文件最后加上
12</action></krpano>